Motores CC
MOTORES DE CORRIENTE CONTINUA
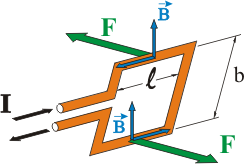
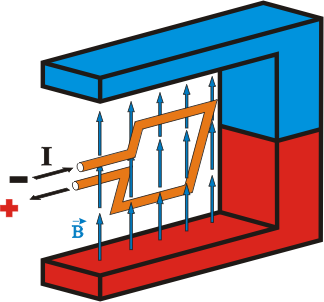
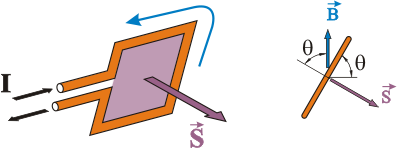
El funcionamiento de todo motor se basa en la fuerza de Lorentz
 |
|
|
Motores CC |
MOTORES DE CORRIENTE CONTINUA El funcionamiento de todo motor se basa en la fuerza de Lorentz
|
Para tener el momento de giro siempre en el mismo sentido, la corriente que se introduce a la espira debe entrar siempre por el mismo extremo. Ésto se consigue de forma idéntica a como se hacía con la dínamo, es decir, mediante un colector formado por delgas:
A este principio básico se aplican varias mejoras. La primera de ellas es instalar varios juegos de espiras para contar siempre con el momento máximo. De esta forma, los colectores están formados por varias delgas:
 |
 |
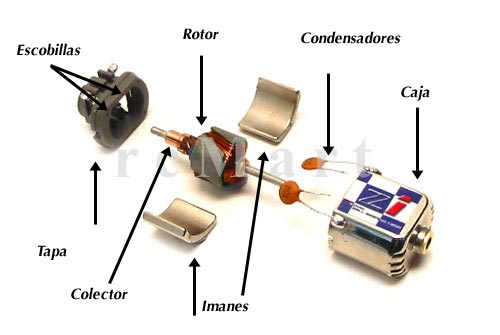
A esta parte giratoria se le denomina rotor o inducido.
La segunda variación es eliminar los imanes permanentes, que sólo se usan en motores de potencia mínima, e instalar electroimanes. A esta parte fija se le denomina estátor, inductor o excitación.

Ya vimos que el momento de giro en un instante dado viene dado por la expresión:
 |
Cuando se calcula el momento resultante durante la vuelta completa de la espira se llega a una expresión que era de esperar. El momento es proporcional a la intensidad de corriente I y al flujo magnético Φ=B·S de los imanes:
![]()
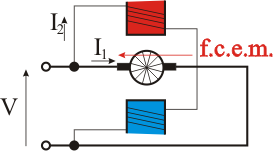
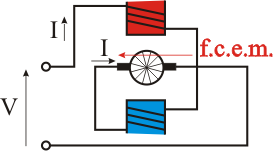
Por otra parte, el hecho de que un conductor se mueva por el interior de un campo magnético provoca en él una fuerza electromotriz que, en el caso de los motores, es un voltaje que se opone a la corriente que se le da. Por tanto, se llama fuerza contraelectromotriz o f.c.e.m. Esta f.c.e.m. viene dada por la expresión:
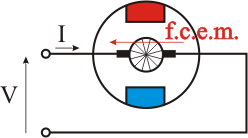 |
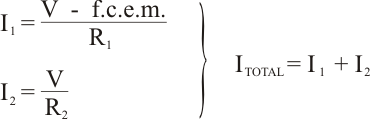
La intensidad que consuma el motor dependerá de esta f.c.e.m. Si RROTOR es el valor de resistencia del cableado del rotor, esta intensidad vendrá dada por:
![]()
Con todo ésto, ya estamos preparados para analizar los distintos tipos de motores de corriente continua:
| MOTOR DE IMANES PERMANENTES |  |
En estos motores el flujo magnético es fijo y sólo se puede variar la corriente suministrada al motor. Es un motor muy barato y de giro estable, por lo que se usa en juguetes o en lectores de discos compactos y DVD.
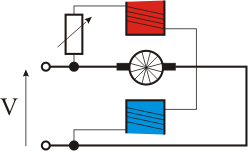
MOTOR DE EXCITACIÓN INDEPENDIENTE
En este caso, la excitación se produce mediante electroimanes, y la corriente que absorben éstos es independiente de la corriente que se de al rotor. Son motores cuya velocidad y momento se regulan bien, pero son poco frecuentes por su complicación.
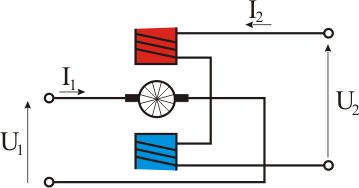
| MOTOR SHUNT O EN DERIVACIÓN | |
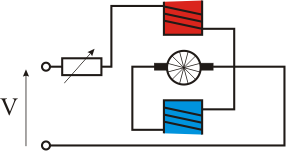
La excitación de estos motores está en paralelo con el circuito de alimentación del rotor.
 |
 |
por lo tanto, cada bobinado consume una intensidad independiente, y al motor hay que suministrarle la suma de ambas:
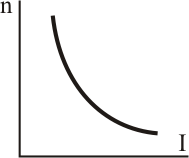
Como la corriente inductora I2 es un valor constante, el campo magnético inductor será también constante. Esto significa que podemos operar para obtener la relación entre velocidad de giro e intensidad:
 |
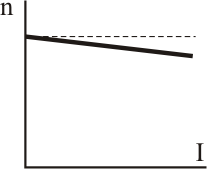 |
Esta gráfica indica que la velocidad apenas varía aunque se suministre más o menos intensidad, es decir, aunque haya alguna variación en el voltaje.
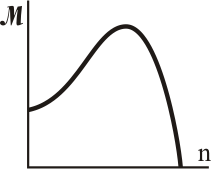
Cuando se analiza la relación entre el momento y la velocidad de giro, se obtiene la llamada curva característica del motor, que para los motores en derivación tiene este aspecto:
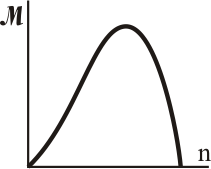
Esta curva indica, en primer lugar, que el motor no tiene par cuando n=0, es decir, en el arranque. Además, la zona de la izquierda representa unas condiciones de trabajo inestables, pues si se produce un frenado imprevisto del motor por el cual la velocidad disminuya, el par que dará el motor será menor que el que tenía y no podrá vencer la causa del frenado. Por contra, la curva de la derecha es la zona estable de funcionamiento: un frenado que reduzca la velocidad de giro produce un aumento del par para vencer la causa de frenado.
Este tipo de motores se utiliza en aplicaciones donde se requiera una velocidad muy estable, por ejemplo en las rotativas de los periódicos donde una diferencia de velocidad entre unos rodillos y otros significaría la rotura del papel.
Para su uso es necesario un sistema de embrague que desconecte mecánicamente al motor de la carga durante el arranque del mismo. Para la regulación de la velocidad se utilizan reóstatos que regulan la corriente de la excitación.
| MOTOR SERIE | |
En estos motores la excitación está en serie con el circuito de alimentación del rotor.
 |
 |
La intensidad que se suministra al motor pasa por los dos bobinados, y tiene un valor:
![]()
es decir, la intensidad que circula por las bobinas inductoras no es constante, y varía con la velocidad de giro, pues la f.c.e.m. también lo hace. Analizando las expresiones matemáticas:
 |
 |
En este caso, hay una fuerte variación de velocidad de giro cuando se produce un cambio en la alimentación. Por su parte, la curva característica de momento en relación con la velocidad de giro tiene este aspecto:
La curva muestra que este tipo de motores tiene momento en el instante del arranque. Además, la zona inestable de la izquierda es menos pronunciada que en motor shunt.
Por ello, los motores serie se utilizan en aplicaciones donde se requiera un elevado par de arranque, como en ascensores o en el encendido de motores de explosión de los vehículos. También se utiliza con frecuencia en el ferrocarril suburbano.
Aunque no necesitan sistema de embrague para el arranque, a veces se le instala. Para la regulación de la velocidad de giso se instala un reóstato que también sirve para aumentar progresivamente la intensidad de arranque. Este reóstato también se puede utilizar para el frenado del motor, eliminando la corriente del rotor y haciéndo funcionar al motor como una dínamo, y la corriente disiparla en dicho reóstato (o devolverla a la red de alimentación).
| MOTOR DE EXCITACIÓN COMPUESTA O COMPOUND | |
En este último caso se aprovechan las ventajas de los motores serie y shunt. Para ello, la excitación tiene dos juegos de bobinas, una en serie con el inducido y otra en paralelo. Ahora bien, la disposición de estas dos bobinas da lugar a dos tipos de motores, en los que predominan uno u otro efecto:
Motor compound corta |
Motor compound larga |
Aunque la conexión eléctrica de los bobinados inductores se aprecia muy bien en los esquemas simbólicos anteriores, en realidad están enrollados sobre los mismos núcleos que, por cierto, se denominan masas polares:
 |
 |
CÁLCULOS EN MOTORES DE CORRIENTE CONTINUA
Además de las expresiones que corresponden a cada tipo de motor, se debe tener en cuenta otra serie de ecuaciones importantes que son comunes a todos los motores:
La potencia absorbida por el motor viene dada por:
![]()
El rendimiento del motor es la relación entre la potencia útil y la potencia absorbida:
![]()
Cuando no hay otros datos, la potencia útil se suele evaluar con la expresión:
![]()
En realidad esta potencia útil es el resultado de restar a la potencia absorbida todas las potencias perdidas, que son:
y para obtener los valores de las pérdidas se suelen hacer ensayos de funcionamiento del motor en vacío, es decir, funcionando sin arrastrar nada, con lo cual las pérdidas en el inducido son despreciables, y la potencia absorbida se gasta en pérdidas en el cobre inductor (P=I2·R), en el hierro y mecánicas, obteniéndo así el valor de estas dos últimas, que se mantiene con el motor cargado.
 |
|
 |
 |