|
Sensores |
SENSORES El término de sensor es muy genérico, y suele agrupar varios elementos. Un elemento que recibe la señal es un captador, y un transductor es un elemento que transforma una magnitud en otra. Pero es corriente que los tres términos se usen indistintamente. Un sensor tiene tres parámetros fundamentales, el rango (valores entre los que puede medir), la resolución (la variación mínima que puede detectar) y la sensibilidad (lo que varía la magnitud de salida en relación con la variación de la magnitud medida). Los sensores se clasifican atendiendo a varios criterios, como:
Pero el análisis más usual es por el tipo de magnitud que pueden medir. |
SENSORES DE POSICIÓN Y DE PROXIMDAD
Informan de la presencia de un objeto en el lugar que controlan. En este tipo se incluyen:
Están constituidos por un conmutador accionado por una palanca, y cierran o abren un circuito cuando un objeto mueve la palanca.
Este detector sólo se puede usar para determinar cuando un objeto ha llegado a la posición del sensor, sin indicar la distancia a la que está.
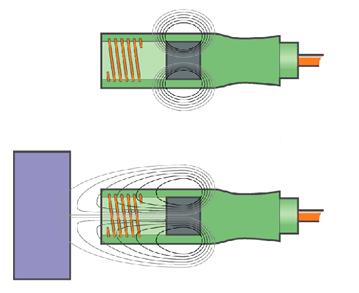
Tiene un imán permanente que crea un campo magnético fijo. Al acercar un objeto metálico, éste modifica el campo magnético, y esta variación es captada por una bobina, en la que se induce una corriente. En este caso, el sensor sí podría determinar la distancia a la que está el objeto, pero sólo se usan para detectar la presencia. Un ejemplo del uso de estos elementos está en la determinación del ángulo de giro del cigüeñal de un motor:
|
|
 |
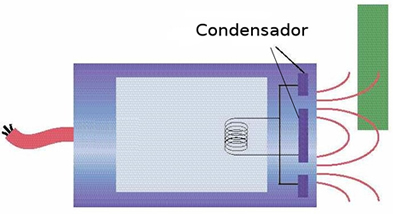
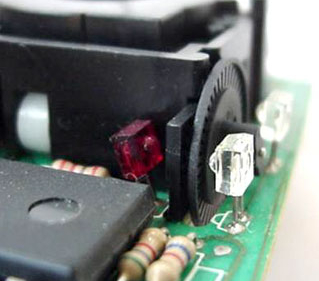
Cuando el objeto a detectar no influye en el campo magnético, se hace uso de otro principio de funcionamiento. En este caso están formados por un condensador, y la detección se basa en la variación de la superficie enfrentada de las armaduras (como en los sintonizadores de radio), la separación entre éstas (como en algunos teclados de claculadoras) o incluso cambiando las propiedades del aislante dieléctrico (como en los detectores de humo o de humedad).
Al acercar un objeto metálico al condensador, se varía el campo eléctrico en el mismo, y ésto puede ser detectado.
Constan de un potenciómetro que varía su resistencia en función de la posición de su cursor, movido por el giro de una rueda dentada o de una palanca. Estos sensores son los que se usan cuando se busca conocer la posición exacta de un objeto, como en el posicionamiento de antenas orientables, o para medir el nivel en los depósitos de combustible de los coches.
|
 |
 |
Su funcionamiento se basa en detectar la reflexión de un haz luminoso que normalmente es infrarojo para evitar inferencias de otras luces. Cuando el sensor emite sonidos el sistema se denomina sonar, y si la radiación es de alta energía (o frecuencia), el sistema se denomina radar. Con estos sistemas se puede tener una señal cuando un objeto interrumpe el rayo, pero también se puede determinar la distancia a la que está el objeto midiendo el tiempo que ha tardado la relfexión.
c= 340 m/s para el sonido c= 300.000 km/s para la luz |
|
|
Un ejemplo típico de los sensores por láser o por infrarojos son los sensores de aparcamiento de los modernos automóviles.
| SENSORES DE VELOCIDAD |  |
Son también conocidos como sensores tacométricos, y pueden ser de tres tipos:
Idénticos a los vistos anteriormente, unidos a un contador, que analiza cuántas señales se producen en un segundo.

De forma similar a los sensores de posición, un emisor y un receptor están separados por una rueda perforada que puede girar. Se cuenta cada impulso de luz que recibe el receptor durante un segundo, obteniendo la velocidad.
Son pequeñas dinamos que obtienen un voltaje en función de la velocidad de giro. Este sistema es ampliamente usado en sistemas como los anemómetros, para medir la velocidad del viento.

SENSORES DE TEMPERATURA
Para esta misión, además de los conocidos termómetros de mercurio, hay otros tres tipos básicos:
Es una resistencia que disminuye su valor óhmico al aumentar la temperatura según una función exponencial.
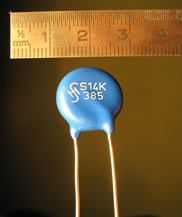
![]()
Son dos pacas metálicas unidas que tienen diferentes coeficientes de dilatación térmica. Cuando se calientan, una lámina se dilata más que la otra, produciendo el arqueamiento de ambas. Con esta deformación se puede abrir o cerrar un circuito eléctrico.
Con un tornillo que regula la fuerza que debe ejercer el bimetal para combarse se puede regular la temperatura a la que se produce la desconexión. Es el clásico control de la calefacción o de las planchas eléctricas.

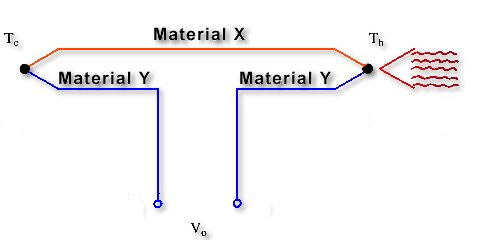
En este caso se sueldan los extremos de dos metales diferentes, y esta unión actúa como sonda. El funcionamiento del termopar se basa en que la movilidad de los electrones es distinta en cada metal. Si los extremos opuestos también están unidos y a una temperatura conocida, las distintas movilidades producen un voltaje tanto mayor cuanto mayor sea la diferencia de temperaturas entre los extremos.

| SENSORES DE PRESIÓN | |
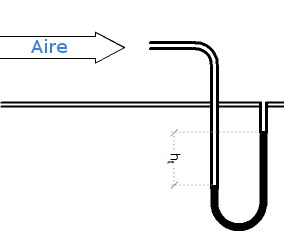
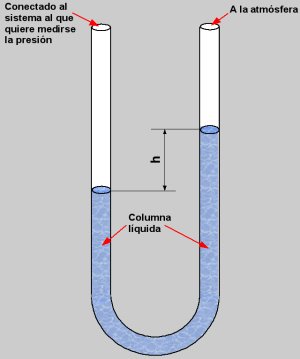
El líquido que hay en la rama con mayor altura compensa, con su peso, la mayor presión en la rama opuesta. Por su naturaleza, se puede emplear también en la comparación de dos presiones.
Etubo en U es un aparato sencillo, pero es la base de sensores más sofisticados, como pueden ser los tubos Pitot, que se usan para medir la velocidad en los aviones.
 |
Tubo Pitot |
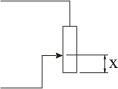
Son sensores que tienen dos cámaras, una de ellas conectada a la presión a medir y la otra a una presión conocida, normalmente la atmosférica. Con la diferencia de presiones se produce un desplazamiento que se puede medir con palancas, engranajes, sensores de desplazamiento,...
Tubo Bourdon |
Cápsula anaeroide |
Las capsulas anaeroides, a veces también llamadas manómetros de membrana, tienen en su interior una presión conocida, o pueden estar conectadas a una presión de referencia, por lo que pueden utilizarse como comparadores. En este caso se denominan fuelles.
Para saber más sobre el tema:
 |
|
 |
 |